
What is a First Person View Drone?
FPV or First Person View is the most unique experience of interacting with your aircraft through a level of immersion that is unparalleled by anything short of virtual reality. In its most basic form, it takes you, the pilot, and transfers your visual consciousness into the body of a fast, agile, and precise flying machine. It gives you a whole new and awe inspiring view of the world around you that only those who fly FPV get to experience. There are really about three different schools of FPV multirotor flying; racing, freestyle, and aerial photography. There’s nothing saying you can’t do more than one of these, or all three! They each have their exciting aspects and there’s a community out there to help support you through your journey.
Freestyle Flying
Freestyle flying is all about your environment, your multirotor, and the interaction between the two. It might be finding that new gap that your multirotor barely fits through, dodging ghost branches as you dance through your local park, finding cool new locations in which to explore, or finally learning that new trick that you saw on someone’s flight video. Freestyle is a form of expression in flight, more focused on acrobatics and exploring your environment. Freestyle also has the added benefit of helping to prepare you for racing by pushing the limits of your multicopter through learning control. As an FPV Beginner, this is most likely where you will start in your journey!
FPV Racing
FPV racing consists of flying either solo, or with a group of other pilots, through a series of obstacles, flags, and gates. As with all racing, the goal is to get first place, either by beating all the other pilots to the finish line or getting the best time on the track. While this may sound simple at first, most tracks will not only push the limit in terms of speed, but will also test your ability to maneuver your multirotor through all aspects of control. Many races come down to who has the fastest reflexes and can find the best line in the track.
Aerial Photography
Aerial photography is just that, viewing and recording whatever your chosen subject matter is from the air. This is a great way to explore the world around you, and gives you a unique experience of taking your photography literally to a whole new level. Aerial photography also has many practical uses, such as showing unique views of real estate, area mapping, or even filming movies!
How a Multirotor Works
A multirotor has four control points; roll, pitch, yaw, and thrust, and each of these work both independently from one another and can work together to create more complex movement. Let’s start with an exercise to show each of these controls. Hold your hand out in front of you palm down. Rock your hand from side to side, that is your roll. Now, tip your hand forward, then backward, that would be pitch. Keeping your hand palm down, turn your hand left then right, that’s an example of yaw. Last, again, keep your palm face down, and lift your hand higher in the air then bring it back down, there is your thrust. Now, when you start to combine roll with thrust, your multirotor will shift either left or right. When you pitch forward the multirotor will start to move forward, and when you pitch back, it will move backward. Yaw is generally used to change your heading, or the direction your multirotor is facing. The more thrust you provide the faster the multirotor will gain altitude, and the roll and pitch effectively change what direction is truly up.
When you first get into the hobby as an FPV Beginner, there is that little thing in the back of your mind that we like to call “instant gratification”. While there is no shame in buying a pre-built multirotor, and there are some great builders out there that will be more than happy to provide that for you, a word of caution; you will crash your multirotor…. many, many times. There are times where a part will not survive your crash, or a wire will get jarred loose, and unless you are fantastic with electronics, you may not know how to conduct repairs. By going through the steps to build your first multirotor as an FPV Beginner, you will understand how the parts work in conjunction with one another, as well as how to fix anything that might be broken. Plus, there is nothing as satisfying as building something that once complete, can take to the skies!
Note: There are a few skills necessary to properly build a multirotor. Check out our blog post on how to solder for some tips!
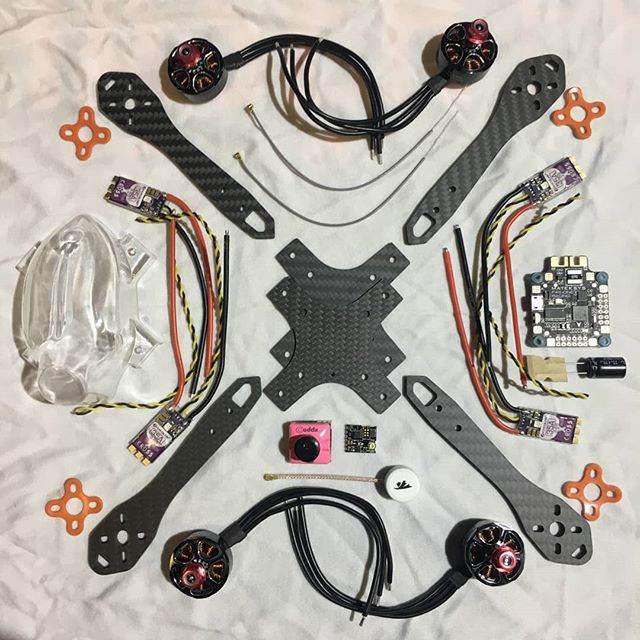
Components of a Multirotor
Parts and components for FPV multirotors can be broken down into three distinct categories, the flight system, the power system, and the FPV system. The flight system consists of motors, propellers, electronic speed controllers (ESC’s), flight controller, and the radio receiver. The power system consists of the battery and the power distribution board. The FPV system contains the flight camera, the video transmitter (VTx), and the antenna. While multirotors can definitely fly without the FPV system, and many pilots out there definitely enjoy the experience, adding the FPV system adds in that level of immersion that makes the experience that much more fulfilling. All your components are mounted on your multirotor frame.
Frames
Frames are the backbone, the skeleton of your multirotor. This is what all your components will mount to, and will ultimately dictate what the multirotor will look like. There are hundreds of frame designs out there, and many pilots create their own custom frames that fit their individual flying styles. Frames are measured in millimeters, not from front to back, but diagonally from center of the motor mount on one arm, to the center of the motor mount on the arm directly diagonal from it. This will give you some general information about how big the overall frame will be so you know what to expect. It will also give you some insight into how big a propeller the frame is meant for (most frames will let you know what size prop it is designed for). Frames are often designed with a specific purpose in mind, either racing, or freestyle. While you COULD do both with any kind of frame, the performance will often be biased toward one. This is something to keep in mind when selecting your frame. Check out our Frames!

Flight System Components
Flight Controllers
The flight controller is essentially the brains of your multirotor, and is easily the most complex component of the flight system. Built into the FC are sensors that tell the onboard firmware the orientation of the multirotor, and also takes in input from the pilot and using the two sets of data, sends commands to the motors to move the multirotor as commanded. Flight controllers are complex pieces of equipment that can be programmed to varying degrees to essentially tune your quad just like you would a racecar. You can also determine how much control you want to give your flight controller over the multirotor, such as allowing it to auto level your quad when not given a command. Most pilots who fly FPV however fly in a mode called “Acro” which does not allow the FC to control the quad beyond user inputs. It will basically only exert influence to maintain the position of the multirotor as the pilot has commanded. Check out our FC's!

Electronic Speed Controllers (ESC’s)
ESC’s are powerful components on the multirotor that take the commands output from the flight controller and translate it into commands for the motors that tell them how fast to spin, what direction to spin in, and when to stop. They do this by taking power from the power system and data from the FC and turn that into three phase electrical pulses that the motors feed off of. By providing more or less power, the motor spin faster or slower in response. Each motor of the multirotor has a dedicated ESC that drives it because in a multirotor flight system, each motor will almost always spin at different speed than its partner motors. This is due to a multirotors flight characteristics, balancing, and outside influences such as wind. Like the flight controller, the ESC has firmware that drives the calculations. Check out our ESC's!

Motors
Motors provide the power that puts your multirotor into the air. Most motors for multirotor are classified as brushless motors, and work by using three phase power to drive electromagnets that spin the motor. While relatively small, brushless motors are fairly powerful. These motors have been used in model aviation for many years, and are the components that draw the most power from your system. Motors are rated by two size numbers allowing you to pick the size you need for your multirotor, as well as the Kv rating, which is defined as the RPM of the motor per volt. As an example, if you have a 2206 – 2450kv motor (a very common motor for 5” multirotor), here’s how it breaks down; the 22 stands for the diameter of the motor, the length in millimeters around the outside of the motor housing. The 06 stands for the height of the motor housing in millimeters. If you are running a 4 cell battery, the nominal voltage would be 14.8 volts. Take the Kv rating of 2450 and multiply it by 14.8, giving you an RPM of 36,260. This would be the maximum RPM under no load, meaning with no propeller attached. Check out our Motor's!

Propellers
Propellers, or props, provide the thrust of the flight system. Attached directly to the motors via the motor shaft, they spin just as fast as the motors do. There are many, many different styles and sizes of props out there, all made with different materials, different blade pitch, different blade shapes, and different number of blades. Propellers are rated in terms of size, blade number, and blade pitch. For example, if you have a 5 x 4.5 x 3, then you have a 5 inch propeller, with a 4.5’’ pitch, with a total of 3 blades. The pitch is defined as how far forward the propeller will move in one revolution. In the case of our example prop, it would move forward 4.5”. So all things being equal, a propeller with a 3” pitch would not generate as much thrust as our 4.5” pitch when spinning at the same speed. The material that the propeller is made of will also affect the durability of the prop when it hits something such as a tree branch or the ground, as well as change the weight of the prop itself. Spinning a heavier prop will also consume more power from your multirotor, so you have to find the right balance here. Check our range of Props!

Radio Receiver and Radio Controller
The radio receiver (Rx) is the component that takes the commands from the pilot’s radio controller and feeds that information into the flight controller. Here, you want choose an Rx that matches up with your radio controller, often determined by brand and or model of controller. There are many brands of radio controllers out there, and this is often up to a pilot’s preference. You want to select a radio system that fits your needs in terms of features, size, ergonomics, and range. When it comes to selecting a radio receiver, this generally comes down to features and size, as well as latency of the overall control system. Latency basically means how long in milliseconds it takes for your commands from the controller to be implemented on your multirotor, and standard logic applies that lower latency is better. Receivers and Controllers Here!

FPV System Components
Flight Camera
The flight camera is your window to the world of FPV. Through it you have access to a remote eye in the sky that will bring you on board your multirotor. There are many different types of FPV cameras, and most of them owe their creation to security camera technology. From that, many companies have developed FPV specific cameras of various sizes, quality, ranging from basic 600tvl standard definition cameras, cameras that specialize in low light situations, and HD cameras with 1080p resolution. One thing to remember though is that the more information the camera provides, the more potential latency you introduce into the system. Check out our cameras!

Video Transmitters (VTx’s)
Video transmitters do just that, transmit the video from your flight camera out in a way that your goggles or ground station can capture it. They range in size, power, and features, and provide the pilot with the wireless technology that makes the entire FPV system possible. They are designed with many possible frequencies that can be used both to work in the environment that you fly in, as well as make it possible for many pilots to take to the sky all at once. The VTx is rated in terms of milliwatts (mW), which gives the pilot an idea of how far the VTx can transmit. Proper management of your VTx is one the finer points of learning to fly in groups, as well as just good manners. Bad management of this single component can lead to causing accidents among your fellow pilots as well as some hurt feelings, so be careful. Check out our range!

Goggles
Your FPV goggles are your visual link to your FPV multirotor. While you can use a ground station and a monitor to fly FPV, that option is not quite as immersive as using a set of goggles. There are many different styles of goggles, ranging from DIY versions that you can assemble yourself, to ready to go models with a ton of features, such as DVR capabilities. These function similar to virtual reality headsets, in that the image is displayed on a screen directly in front of your eyes, making you feel like you are a part of you multirotor as it speeds through the skies. The googles have a component called the Video Receiver (VRx) that like any other FPV component, comes in multiple styles and capabilities. Attached to them is an antenna, very similar to the one attached to your VTx on you multirotor, but again come in different types, styles and technology that determine how far away you can fly your multirotor from where you are at. Check out our goggles!

Power System Components
Power Distribution Boards
Power Distribution Boards have helped to simplify wiring of a multirotor tremendously. Not that long ago, multirotor components got their power by a complex system of wiring all the components directly together in a system called a wiring harness, but then power distribution boards came into favor. On the board, the battery is wired to the board through a connector, and from there, your components are all wired into the board. The board very simply provides power to all the components. There are several features to some boards just beyond simple power distribution, such as power filtering that helps keep the power going to your components “noise” free, providing cleaner, more reliable power. They also have features that can provide power of different voltages to different components, to help keep components effective at their optimum voltage levels. Check out our PDBs!

Batteries
Batteries are the primary power sources of your multirotor and can have a huge impact not only on how long you fly, but how powerful your total multirotor is. Multirotors are generally powered by a battery technology call lithium polymer batteries, and are made up of individual cells. Each cell have a voltage rating of 3.7 volts, and by adding more cells to the battery, you add more voltage. If you remember our conversation above about motors, the speed at which a motor spins is dependent on how much voltage the motor is provided. The more voltage, the faster the motor is capable of spinning. Choosing the right battery is also a very fine balancing act in terms of weight vs. power. The more weight you add to the multirotor, the shorter the flights, and the more weight the motors have to push around. Out of all the single components, the battery will add the most amount of weight to your multirotor. Batteries are rated by both voltage and amp hours. Amp hours tell you how long the charge on a battery will last while under load; the higher the amp hours, the longer they will last. Check out our lipos!

3 comments
ZenaDrone
I Have read this article more help full and if you want
https://www.zenadrone.com/fpv-drones-explained-understanding-first-person-view-flying/
Toby Clark
This guide is super helpful. I’ve been looking for a short and concise guide to understand the FPV terminology and this has done just that. Thank you!
Jonah from Perth, WA
Man this is a great guide, I have been looking for something like this for while, very informative and straight to the point. Thanks